










Датчик для бесконтактного измерения и проверки профиля поверхности, размеров, деформаций, плоскостности, зазоров, объема и построения 3D-моделей.

- Диапазон измерения от 10 до 1165 мм
- Линейность 0,05%
- Частота дискретизации: 484,938,5096,6800 профилей / с
- Интерфейс: Ethernet / 1000 Мбс
- Входы синхронизации: RS422, 3 канала
- Выходы: RS422, 1 канал
- Ударные нагрузки: 30 г / 6 мс
- Класс защиты: IP67
- Напряжение питания: 9...30 В или 12...36 В для сканеров с синим лазером
В сканере РФ627Smart анализ, расчеты, измерения, контроль допусков выполняются по алгоритму, созданному пользователем. Результаты измерений могут быть переданы по различным протоколам (Ethernet/IP, Modbus TCP, UDP), а также на логические выходы сканера для управления исполнительными механизмами и сигнализации годности изделия.
Технические параметры
| Диапазон | MR, мм | SMR, мм | EMR, мм | Хsmr, мм | Xemr, мм | Лазер | Размер, мм | Вес, кг | |
|---|---|---|---|---|---|---|---|---|---|
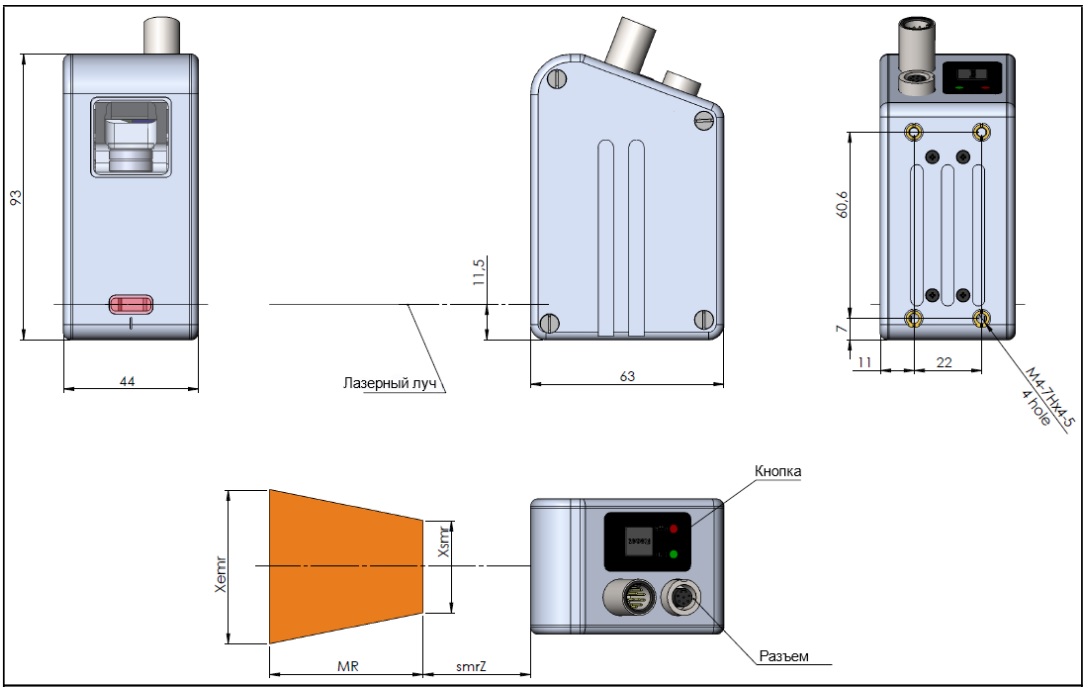
| 25/10-8/11 | 10 | 25 | 35 | 8 | 11 | 660 нм или 405 нм или 808 нм Class 2M | 72х71х44 | Рис. 1 | 0,37 |
| 65/25-20/22 | 25 | 65 | 90 | 20 | 22 | 93х63х44 | Рис. 2 | 0,6 | |
| 75/50-30/41 | 50 | 75 | 125 | 30 | 41 | ||||
| 70/100-48/82 | 100 | 70 | 170 | 48 | 82 | ||||
| 70/150-58/122 | 150 | 70 | 220 | 58 | 122 | ||||
| 95/150-53/106 | 150 | 95 | 245 | 53 | 106 | ||||
| 82/200-60/150 | 200 | 82 | 282 | 60 | 150 | ||||
| 90/250-65/180 | 250 | 90 | 340 | 65 | 180 | ||||
| 180/250-170/278 | 250 | 180 | 430 | 170 | 278 | L=326 | Рис. 3 | 2 | |
| 190/300-160/300 | 300 | 190 | 490 | 160 | 300 | L=283 | 1.9 | ||
| 220/300-203/330 | 300 | 220 | 520 | 203 | 330 | L=374 | 2.1 | ||
| 260/400-210/400 | 400 | 260 | 660 | 210 | 400 | L=350 | 2.2 | ||
| 325/500-268/500 | 500 | 325 | 825 | 268 | 500 | L=415 | 2.3 | ||
| 400/600-320/600 | 600 | 400 | 1000 | 320 | 600 | L=490 | 2.4 | ||
| 475/700-374/700 | 700 | 475 | 1175 | 374 | 700 | L=558 | 2.5 | ||
| 545/800-425/800 | 800 | 545 | 1345 | 425 | 800 | L=627 | 2.6 | ||
| 615/900-480/900 | 900 | 615 | 1515 | 480 | 900 | L=696 | 2.7 | ||
| 690/1000-535/1000 | 1000 | 690 | 1690 | 535 | 1000 | L=765 | 2.8 | ||
| 620/1165-430/1010 | 1165 | 620 | 1785 | 430 | 1010 | L=554 | 2.5 | ||
| Быстродействие, точность, разрешение | |
| Быстродействие (для полного рабочего диапазона) | 484 профилей/с в стандартный режиме, 938 профилей/с в режиме DS |
| Максимальное быстродействие (режим ROI) | 5096 профилей/с 6800 профилей/c в режиме DS |
| Линейность (погрешность), Z ось | ±0,05% от диапазона (стандартный режим), ±0,1% от диапазона (режим DS) |
| Линейность (погрешность), Х ось | ±0,2% от диапазона |
| Разрешение, Z ось | 0,01% от диапазона (стандартный режим) 0.02% от диапазона (режим DS) |
| Разрешение, Х ось | 648 или 1296 точек (программируемое значение) |
| Лазер | |
| 660 нм или 405 нм или 808 нм Class 2M по IEC/EN 60825-1:2014 | |
| Интерфейс | |
| Основной | Ethernet / 1000 Мбс |
| Входы синхронизации | RS422, 3 канала |
| Вход аппаратного вкл/выкл лазера | 1 |
| Выходы | RS422, 1 канал |
| Напряжение питания | 9...30 В или 12...36 В для сканеров с синим лазером |
| Потребляемая мощность, не более | 6 Вт (без нагревателя) |
| Устойчивость к внешним воздействиям | |
| Класс защиты | IP67 |
| Уровень вибраций | 20 г / 10…1000 Гц, 6 часов для каждой из XYZ осей |
| Ударные нагрузки | 30 г / 6 мс |
| Окружающая рабочая температура, °С | -20…+40 или -40…+40 для сканеров со встроенным нагревателем или -40…+120 для сканеров со встроенным нагревателем и системой охлаждения |
| Относительная влажность | 5-95% (без конденсации) |
| Температура хранения, °С | -20…+70 |
| Материал корпуса / окон | алюминий / стекло |


Принцип работы
В основу работы сканера положен принцип оптической триангуляции.
Излучение полупроводникового лазера формируется в виде линии и проецируется на объект. Рассеянное на объекте излучение объективом собирается на двумерной CMOS-матрице. Полученное изображение контура объекта анализируется сигнальным процессором, который рассчитывает расстояние до объекта (координата Z) для каждой из множества точек вдоль лазерной линии на объекте (координата Х). Сканеры характеризуются началом рабочего диапазона (SMR) по координате Z, рабочим диапазоном (MR) по координате Z, рабочим диапазоном по координате Х в начале рабочего диапазона по Z (Xsmr) и в конце рабочего диапазона по Z (Xemr).

Применение
Высокоточные бесконтактные измерения:
Профиль


Распознование
Контроль сварочного шва
