









В статье приводится методика измерения длины и пройденного пути через измеренную скорость с помощью датчиков ИСД-3 и ИСД-5.
Исходные положения:
- Первичным измеряемым параметром является скорость объекта
- Длина (путь) вычисляется как сумма ΔSi = ΔVi*Δti , при этом время между измерениями Δt =30 мс (при частоте измерений 33 Гц), т.е. значение скорости (и пути) обновляется каждые 30 мс.
- Частоту измерений значительно увеличить не удается, поскольку из общих принципов для точного измерения требуется некоторое время (его можно сократить, но соответственно ухудшится точность единичного измерения).
Обычно этого достаточно для дорожных применений, тем более, что измерения начинаются и заканчиваются на нулевой скорости. Однако, для точного измерения пути между двумя точками на большой скорости этого может не хватить. Например, при 30 м/с за 30 мс объект пройдет 0,9 м, соответственно, это будет дискретность измерения пути на данной скорости. Для увеличения точности можно фиксировать точное время начала и конца измерения пути (для этого необходимы дополнительные данные, например, метки на дороге) и точное время получения новых данных скорости. Тогда Δt начальное и конечное можно скорректировать (см. рис.1).
Промышленные применения: например, есть задача нарезать длинномерный объект (пруток) на мерные куски 1 м. Для этого надо принять данные скорости, вычислить длину и выдать команду отрезному механизму. Очевидно, обычный компьютер с ОС не реального времени не годится, поскольку всегда есть неконтролируемая задержка приема и выдачи сигналов (буферизация и т.п.), какой бы порт (Ethernet, USB, RS485) мы ни использовали.
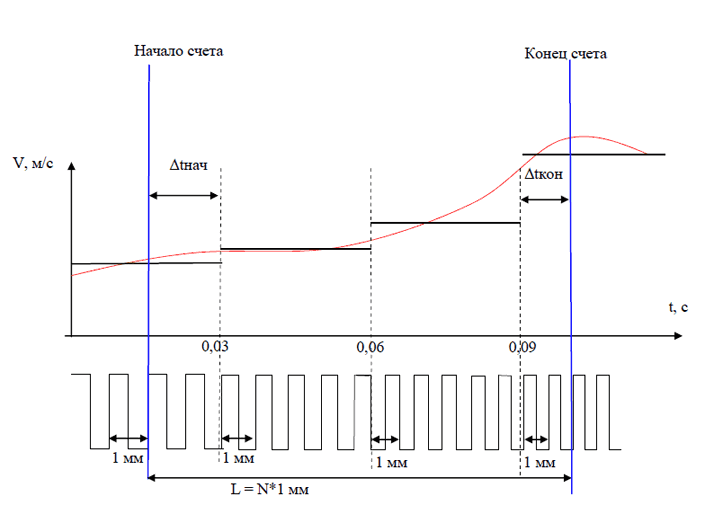
Поэтому, все вычисления длины должны производится контроллером без ОС, с жестким алгоритмом реального времени. Более того, система приема данных и выдачи исполнительного сигнала также должна быть реального времени. При этом наиболее точным является перевод данных длины в непрерывную последовательность импульсов, частота которых жестко привязана к текущей измеренной скорости и эта частота обновляется каждые 30 мс. Например, в контроллере выставлено, что скорости 1 м/с соответствует 1000 Гц импульсного выхода. За 1 с объект пройдет 1 м, соответственно, на каждый импульс приходится 1 мм длины. При 2 м/с выходная частота 2000 Гц и на каждый импульс опять приходится 1 мм. Т.е. для любой измеренной скорости выходная частота изменяется так, что всегда 1 имп = 1 мм. Это поясняется рис.1:
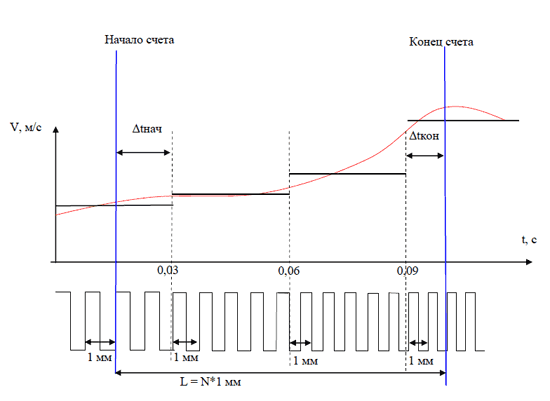
Рис.1. Изменение частоты импульсного сигнала (меандр) от измеренной скорости. Частота изменяется после очередного измерения скорости, но по достижении целого числа периодов предыдущего измерения, поэтому нет никаких скачков (дополнительных импульсов) при изменении частоты.
Здесь красная линия – реальная скорость, черные – измеренная скорость за предыдущие 30 мс.
Оценка погрешности измерений из-за дискретности измерения скорости:
При постоянной скорости объекта частота измерений не важна, измерили ее – выставили частоту – далее считаем импульсы и по достижении заданной длины выдаем команду на исполнительный механизм. Конечная точность определяется уже точностью исполнительного механизма (физической задержки исполнения и ее постоянством). При этом, если задали отрез через 1000 имп (1м) при первом отрезе физическая задержка может привести к удлинению первой заготовки, но все последующие будут ровно по 1 м.
При переменной скорости ее нужно измерять чем чаще, тем лучше. Оценим, какая частота измерений достаточна (дальнейшее увеличение не приводит к увеличению точности отреза) исходя из критерия максимально физически возможного ускорения объекта. Пусть это будет 10 м/с2(см. рис.2) Тогда за время 30 мс объект увеличит скорость на V=at = 0,3 м/с. Пусть при постоянной скорости 10 м/с мы измеряем длину за 2 измерения (за 0,06 с) при выставленном коэффициенте 1000 Гц/м/с. Получим 10000 имп/с *0,06с = 600 мм или по 300 мм на измерение. При ускорении объекта 10 м/с2 получим скорости, например, 9,7 и 10,3 м/с, соответственно частоты 9700 и 10300 Гц и число импульсов 291 + 309 = те же 600 мм. и переместится на S = at2/2 = 4,5 мм.
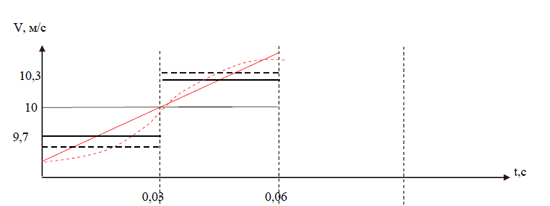
Рис.2. Движение объекта с постоянным ускорением 10 м/с2 и с переменным (пунктирные линии скорости).
То есть, при движении объекта с постоянным ускорением результат измерения длины также не зависит от частоты измерения. Разумеется, при переменных ускорениях могут быть эффекты второго порядка нелинейности, например, при нарастании ускорения измеренная длина немного занижается, а при нарастании замедления – завышается. Но, поскольку скорость движения колеблется относительно некоторой заданной для процесса, эти эффекты взаимно компенсируются, тем более на длинах в десятки метров. Практика показала, что частоты измерения 35 Гц (как сейчас) достаточно для практически всех применений (если не рассматривать импульсные процессы (ударные, с большими ускорениями и малыми временами)).
Таким образом, импульсный выход позволяет измерить длину с практически любым разрешением (можно выставить и 0,1 мм/имп), и конечная точность зависит уже от исполнительного механизма. При этом важно, чтобы счетчик этих импульсов, выдающий сигнал на механизм, считал их в реальном времени. Обычно для этого применяются промышленные микроконтроллерные счетчики типа СИМ или Овен (цена 3 – 6 т.р.). В счетчике задается число импульсов, по достижении которого выдается сигнал на встроенное твердотельное реле, после чего немедленно начинается новый счет. Также имеется множество дополнительных функций (учет общей длины за смену, месяц и т.п.).