










ABD разработала систему, которая позволяет Роботу-водителю управлять автомобилем по заранее заданной траектории. Система позволяет осуществлять точное управление транспортным средством на высоких скоростях при больших боковых ускорениях. Необходимые маневры можно повторить с высоким уровнем воспроизводимости. Для контроля движения и определения отклонения от заданной траектории в режиме реального времени используется детектор движения на базе GPS , установленный внутри автомобиля. Показания детектора позволяют рассчитать отклонение от заданной траектории и корректирующие величины. Система может использоваться на любом подходящем тестовом полигоне без адаптации к поверхности трека. Движение по заданной траектории при помощи Робота «водителя» SR30/SR60 возможно при наличии дополнительного программного модуля (и контроллера сервомотора на предыдущих моделях). Система была проверена с комплектами оборудования OxTS , GeneSys и iMar .
преимущества комплекта
- Программный модуль контроля траектории интегрированный в стандартное программное обеспечение Робота- водителя
- Траектория может быть легко задана при помощи стандартных функций встроенного программного обеспечения
- Дружественный программный интерфейс
- Простота перенастройки на другое транспортное средство
- Алгоритм действий может быть изменен пользователем
- Очень удобен для тестов на больших скоростях с высоким боковым ускорением
- Система может использоваться с различными устройствами обратной связи
- Точность измерения траектории до 2 см с использованием относительных GPS измерений (зависит от оборудования)
- Точная синхронизация устройств по времени (если используются роботы для торможения или для ускорения) с использованием GPS времени
- Может использоваться для определения точного положения транспортного средства на треке
программное обеспечение
Новая траектория движения может быть выбрана из набора стандартных маневров:
- Прямая линия
- Кривая с постоянным радиусом
- Спиралевидные кривые
- Изменение направления движения
- Двойное изменение направления движения (включая международные ГОСТ)
- Слалом
Для каждого типа маневра могут быть заданы индивидуальные параметры движения. Траектория движения автоматически перерассчитывается и может быть просмотрена перед запуском робота «водителя».

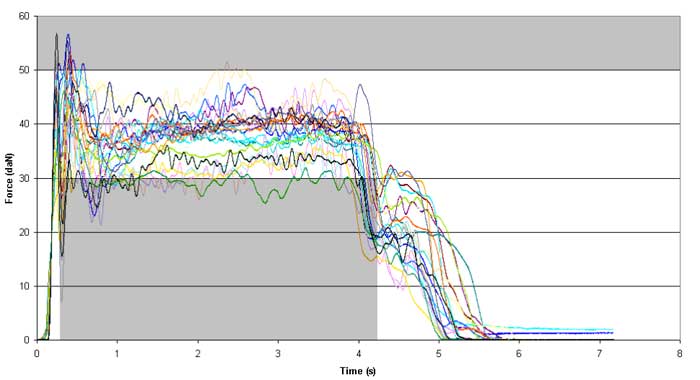
По окончании маневров, полученные результаты могут быть распечатаны. Фактическую траекторию движения можно сравнить с эталонной траекторией движения и определить значение таких параметров как отклонение от траектории, уровень бокового ускорения и т.п.
Точность движения по заданной траектории зависит от множества факторов, таких как скорость движения, боковое ускорение, сцепление с дорожной поверхностью. В случаях, когда боковое ускорение незначительно, соответственно небольшое боковое скольжение шин, отклонение от заданной траектории не будет превышать нескольких сантиметров.

Как показала практика, результаты измерений с использованием данной системы имеют значительно более высокую точность и воспроизводимость относительно тестов с водителями-испытателями.