











Назначение
Система предназначена для бесконтактного сканирования и измерения внутреннего диаметра труб.
Основные технические данные
| Параметр | Значение |
|---|---|
| Диапазон измерения диаметра, мм | 35...55 |
| Погрешность измерения диаметра, мм | ±0,05 |
| Погрешность линейного перемещения, мм | ±0,05 |
| Глубина измеряемого отверстия, мм | 100 |
| Пространственное разрешение, точек/оборот | 3200 |
| Линейность лазерного датчика, мкм | ±15 |
| Разрешение лазерного датчика, мкм | 3 |
| Частота выборки лазерного датчика, Гц | 9400 |
| Выходная мощность, мВт | <1 |
| Класс лазерной безопасности | 2 (IEC60825-1) |
| Источник излучения | красный полупроводниковый лазер, длина волны 660 нм |
| Интерфейс | Ethernet и PROFINET |
| Напряжение питания, В | 220 |
| Время измерения, с | <5 |
| Устойчивость к внешним воздействиям: | |
| Уровень вибраций | 20 г /10…1000 Гц, 6 часов для каждой из XYZ осей |
| Ударные нагрузки | 30 г / 6 мс |
| Окружающая освещенность, люкс | 30000 |
| Относительная влажность | 5-95% (без конденсации) |
| Окружающая рабочая температура, °С | 0…+45 |
| Температура хранения, °С | -20…+70 |
| Вес (без кабелей), грамм | 6800 |
Устройство и принцип работы
Работа системы основана на принципе сканирования внутренней поверхности отверстия вращающимся триангуляционным лазерным датчиком.
Система содержит основную раму, на которой установлены механизм линейного перемещения, контроллер и интерфейсный модуль. Механизм линейного перемещения несет модуль вращения, на котором установлен лазерный датчик. На задней стенке системы размещены четыре разъема для подключения питания и интерфейсов.
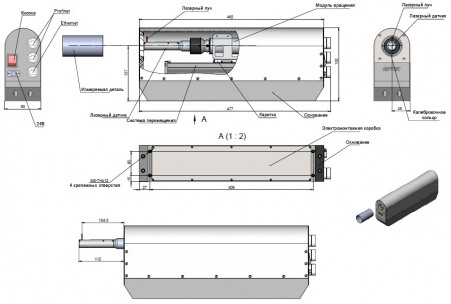
Рисунок 1. Схема №1 с одним датчиком (слева) и схема №2 с двумя датчиками (справа)
Система работает следующим образом.
Измеряемая трубка устанавливается на одной оси с лазерным датчиком. По команде внешнего контроллера лазерный датчик начинает вращение и сканирует внутреннюю поверхность трубки, передает полярные координаты поверхности (расстояние от оси вращения, измеренное датчиком, и соответствующий угол вращения) на встроенный компьютер для расчета требуемых геометрических параметров. Результат передается на внешний контроллер через PROFINET.
Пример обозначения при заказе
РФ096-Dmin/Dmax-L
Символ | Описание |
|---|---|
Dmin/Dmax | Диапазон измерения внутреннего диаметра, мм. |
L | Глубина измеряемого отверстия, мм. |