









Измерительная машина предназначена для бесконтактного измерения геометрических параметров объектов, в частности семян подсолнечника, и представляет собой автономный программно-аппаратный комплекс.
Технические характеристики машины могут быть изменены под конкретную задачу.
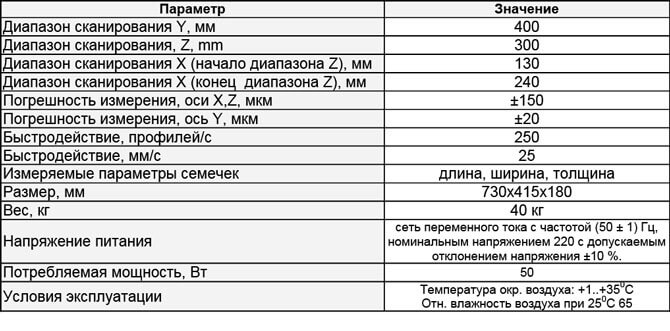
 | Поле сканирования, мм 300x400 |
→ pdf Инструкция по эксплуатации - 3D лазерная сортирующая машина (632 KB)
3D лазерная сортирующая машина РФ1010SS В основу работы машины положен принцип 3D лазерного сканирования объекта/объектов с последующим получением 3D компьютерной модели и определения из полученной модели геометрических параметров. Лазерное излучение 12 сканера 5 формируется в виде линии 13 и проецируется на стол 1, на котором расположены контролируемые объекты. Длина лазерной линии соответствует ширине стола. Полученное изображение контура (профиля сечения) объектов, расположенных на столе, анализируется сигнальным процессором сканера, который рассчитывает расстояние до объекта (координата Z точек) для каждой из множества точек вдоль лазерной линии на объекте (координата Х точек). Спецификация
Принцип работы
Устройство машины поясняется рисунком 1.
Машина содержит стол 1, на котором установлена рамная конструкция 2 с направляющей 3. На направляющей 3 установлена каретка 4, несущая лазерный сканер 5. Каретка 4 приводится в движение шаговым двигателем 6 посредством шарико-винтовой пары (не показана). В крайних положениях каретки 4 установлены концевые выключатели (не показаны). На раме 2 установлен блок индикации 7. На боковой панели машины установлен разъем питания 8 (220В) и два сетевых гнезда 9 для подключения Ethernet. Подключение машины к ПК 10 осуществляется через сетевой коммутатор 11.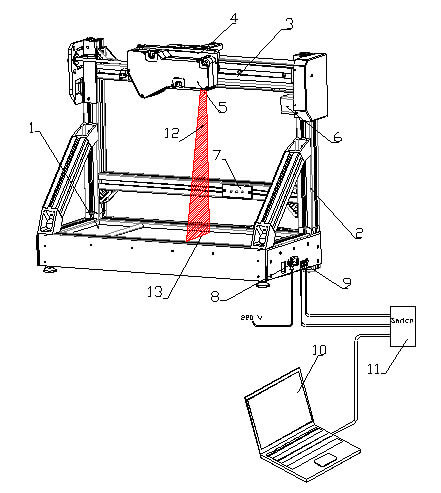
Машина работает следующим образом.
Установленный на каретке лазерный сканер перемещается вдоль стола 1, направление перемещения формирует координату Y. Через определенные фиксированные линейные интервалы вдоль координаты Y, задаваемые шаговым приводом, лазерный сканер определяет координаты точек профиля объектов (X,Z). В результате получают 3D компьютерную модель отсканированной области в виде облака точек с известными координатами (X,Y,Z). Требуемые геометрические параметры объектов рассчитываются из полученной 3D модели.