










Бесконтактный принцип измерения скорости достаточно прост. «Простейший» прибор – глаз. Каждый, глянув в окно вагона или автомобиля, может оценить скорость движения по пробегающему мимо пейзажу. «Обработка» сигнала при этом происходит в мозгу – оценка расстояния до какого-либо объекта, его угловая скорость, плюс жизненный опыт. То же, с гораздо более высокой точностью, можно измерить на приборном уровне.
Рассмотрим сначала лазерный датчик, как наиболее простой. Итак, есть движущийся объект, осветитель этого объекта (иначе ничего не увидим) и регистрирующая отраженный сигнал оптическая система. Это может быть просто линза и фотодетектор (ФД).
Объект неоднороден по яркости и шероховатости, поэтому при движении, ФД будет регистрировать сигнал, частота которого пропорциональна скорости. Характерное значение этой частоты определяется линейным размером области регистрации ФД и временем пересечения этой области элементом объекта. В принципе, задача решена, но очень неточно. Это так называемый низкочастотный сигнал. Для увеличения точности измерений необходимо сузить спектр частот, генерируемый движущимся объектом. И для этого есть радикальное средство – пространственный фильтр. Это термин из области оптических растровых датчиков.
В случае лазерных датчиков – это просто создание интерференционной картины, т.е. периодической модуляции освещенности объекта в пределах лазерного пучка (это область детектирования). Это возможно благодаря свойству когерентности лазерного излучения – все фотоны в пучке сфазированы. Достаточно разделить исходный пучок на два пучка, и свести их под углом к другу. Это и есть в данном случае пространственный фильтр. Теперь любой перепад профиля или яркости объекта, пересекающий эту периодическую структуру, даст отраженный сигнал, интенсивность которого промодулирована с частотой «период освещенности» – «скорость его пересечения».
При этом, чем больше число созданных периодов – тем уже спектр сигнала – единичный перепад профиля или яркости объекта будет генерировать не один импульс, а множество (цуг) импульсов, число которых определяется количеством периодов интерференционной картины. На практике – например, при диаметре пучка на объекте 5 мм и периоде интерференции 0,05 мм – получаем 100 штрихов интенсивности, соответственно, цугов сигнала, т.е. спектр сузился примерно в 100 раз по сравнению с вышеописанным низкочастотным сигналом (который теперь малоинформативный, более того, мешает и так и называется – паразитный). Отметим, что достаточно 20 – 30 штрихов для достижения точности измерений лучше 0,1%.
В случае оптических датчиков – объект освещается однородным источником (просто лампочка или светодиод) – а периодическая структура (растр) находится внутри датчика. При этом он получается гораздо более защищенным (это как в спорте – санки и бобслей) – но возникает множество проблем, основная из которых – зависимость частотного отклика ( коэффициент пропорциональности между частотой регистрируемого сигнала и скоростью объекта в Гц/(м/с)) от расстояния до объекта. Забегая вперед, отметим, что сейчас эта проблема решена кардинально.
Подробный обзор по лазерным и оптическим датчикам скорости (способы создания пространственных фильтров, методы обработки сигналов…) можно найти в монографии [1]. На двух сотнях страниц описана вся теория. Только не сказано, как же на этой основе сделать работающий в реальных суровых условиях (температурный диапазон, различные поверхности и изменения расстояний до них в процессе измерений) датчик.
Производителей реальных бесконтактных датчиков в мире не так много – порядка десятка фирм выпускают лазерные датчики, еще меньше – оптические. В данной статье рассмотрим подробнее датчики обоих типов, производимые российской фирмой ООО «ПТП«Сенсорика-М».
Поскольку она недавно вышла на этот рынок, при создании датчиков использовались самые последние достижения, как в области «железа», так и в математических алгоритмах обработки сигнала плюс оригинальные технические решения, созданные совместно со специалистами Института общей физики РАН. Например, оригинальный оптический моноблок для лазерного датчика, основанный на принципе деления пучка по волновому фронту обеспечивает стабильную интерференционную картину, нечувствительную к изменениям температуры, с нулевой разностью хода пучков, что обеспечивает максимальный контраст штрихов в большом диапазоне расстояний до объекта. При этом отсутствуют какие-либо юстировки оптического блока. Оптическая схема приемной растровой системы оптического датчика полностью устраняет зависимость измеренной скорости от расстояния до объекта при сохранении высокой светосилы оптики. На данное техническое решение получены патенты России и Германии [2].
В приемной аналоговой электронике и в части аппаратной обработки сигнала также используются самые современные микросхемы и микроконтроллеры с сигнальными процессорами, что позволяет измерять скорость с высокой частотой и реализовывать различные выходные сигналы – аналоговые, частотные, цифровые. Выпускается широкая линейка датчиков обоих типов, с номинальными расстояниями до объекта от 15 до 130 см и диапазоном измеряемых скоростей от 0,01 до 100 м/с для самых различных применений в промышленности и на транспорте (подробнее можно посмотреть на сайте компании). В 2014 г. лазерный датчик внесен в Госреестр СИ (средств измерений), оптический датчик будет внесен в Госреестр в 2015г.
Отметим, что оба типа датчиков измеряют пройденный путь (длину, которая обычно и требуется на практике) по измеренной скорости (интеграл скорости по времени). При этом техническая точность измерений (возможности датчика в смысле повторяемости измерений) уже достигла своего практического предела и превышает обычные потребности практики. Например, в технических данных приводится точность измерений длины <0,1% - это некоторая условность, поскольку зависит от самой длины и возможностей независимой проверки этой точности (реально это может быть гораздо точнее, см. примеры измерений далее). Поэтому теперь основной упор делается на надежность измерений, т.е. отсутствие сбоев при самых различных условиях и типах поверхностей.
Еще об измерении длины в стандартных промышленных задачах, а именно: имеется некоторый длинномерный движущийся объект (металлическая полоса, стеклянное полотно, текстиль…), который нужно нарезать на куски определенной длины. Датчик должен выдать сигнал на исполнительный механизм по достижении этой длины. Пусть имеется цифровой выход (Ethernet, USB…) с которого можно считать текущую измеренную длину. Например, при частоте измерений 50 Гц и скорости объекта 1 м/с данные текущей длины будут иметь квант (1м/с)/(0,02с) = 2 см чего может быть недостаточно. Однако, есть также импульсный выход длины с коэффициентом, например 1000 Гц на 1 м/с или 1000 импульсов на метр. Частота на этом выходе обновляется 50 раз в секунду, так что так что при любой скорости квант измеренного пути равен 1 мм. Очевидно, можно выставить и 10 тыс. имп/м так что точность измерений длины можно считать идеальной и конечная точность ограничивается уже механикой режущего механизма.
Далее приведем несколько примеров применения датчиков с оценкой точности и повторяемости измерений.
Тест лазерного датчика пройденного пути и длины ИСД-5 для дорожных применений
Высота установки датчика – примерно 50 см (допустимо от 35 до 65 см). Частота измерений: 54,2 Гц, пределы измерения скорости: 0,02 – 110 Км/ч. Проезд по замкнутой траектории длиной около 1 Км (в условиях города, день, солнечно, температура -7 ˚С). Движение с переменной скоростью (0-50 Км/ч), с несколькими остановками. Результаты измеренного пути по трем заездам: 1055,740 м, 1056,244 и 1055,33 м, т.е. повторяемость измерений составила <0,05%, причем сюда входит и неидеальность повторения траектории.
Прохождение дистанции с использованием двух датчиков (оптический и лазерный параллельно)
Оба датчика устанавливались на автомобиле, как это представлено на рис.1.
В статье приводится краткий обзор принципов измерения скорости и пройденного пути (длины) бесконтактными лазерными и оптическими датчиками и демонстрируются технические параметры этих приборов на примере продукции российского предприятия ООО «ПТП«Сенсорика-М».

Рис. 1. Оптический датчик ИСД‑3 и лазерный ИСД‑5, закрепленные на автомобиле во время тестовых заездов.
Номинальная высота оптического датчика ИСД-3 – 50 см, лазерного датчика ИСД-5 -130 см, но установлен он на высоте 100 см. На прямом участке асфальтовой дороги проведено 4 заезда (по 2 в каждую сторону) примерно одинаковой длины и сравнивалась относительная разность показаний датчиков. Результаты представлены в Таблице.
Табл.1. Результаты параллельного измерения одного и того же пути обоими датчиками.
| Номер заезда | ИСД-316, м (изм 23,6 Гц) | ИСД-505, м (изм 40,6 Гц) | Отн. Разница, % (V3/V5 -1)*100 |
| 1 | 1345,68 | 1345,01 | - 0,05 |
| 2 | 1394,01 | 1395,08 | 0,07 |
| 3 | 1382,51 | 1382,73 | 0,016 |
| 4 | 1345,14 | 1343,06 | -0,15 |
| Средняя относительная разница | 0,03 ± 0,1 % | ||
Таким образом, реальное качество измерений обоих датчиков в дорожных применениях одинаково и относительная повторяемость измерений составляет сотые доли процента. При этом отметим, что вообще для дорожных применений предпочтительно использовать оптический датчик, поскольку он значительно более устойчив к внешним неблагоприятным условиям, как это упоминалось выше (температура, снег, дождь…), в частности, он малочувствителен к загрязнениям входной оптики – это как фотоаппарат – объектив может быть совсем грязным, но фотографировать, в принципе, не мешает. В то же время попадание, например, капли воды на выходную оптику лазерного датчика может сильно исказить интерференционную картину на объекте.
Для общего представления качества измерений на рис.2 представлен график скорости разгона – торможения локомотива с товарным составом ( Щербинский ЖД полигон, датчик скорости и дистанции – ИСД-3, номинальное расстояние 80 см, устанавливался на днище локомотива и «смотрел» прямо на шпалы).
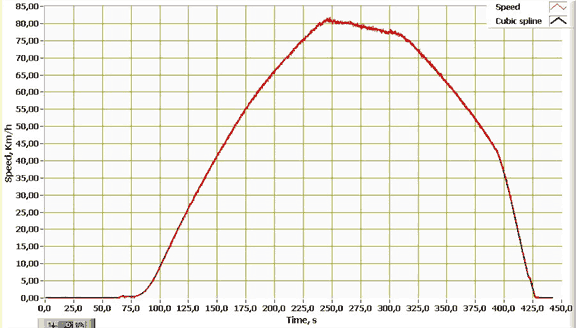
Рис. 2. График скорости разгона и торможения локомотива с товарным составом.
График позволяет оценить мгновенную точность измерений скорости, поскольку движение ЖД состава – пример максимальной плавности скорости. Также в качестве иллюстрации приводятся очень интересные и познавательные графики – тормозные испытания автомобильных шин на льду (ледовый каток «Арена» в Мытищах, использовался оптический датчик). На рис. 3а представлены результаты пяти заездов разгон – торможение на зимних не шипованных шинах, на рис 3б – то же самое на шипованных.
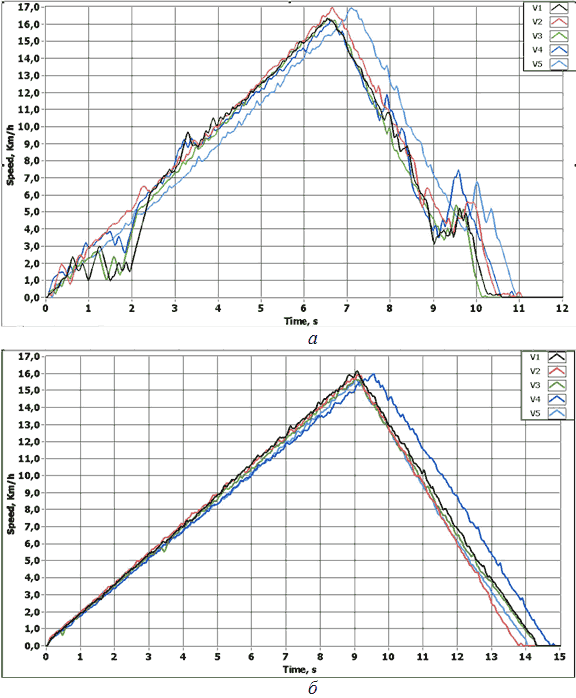
Рис. 3. Точность, с которой оптический датчик ИСД-3 измеряет скорость разгона и торможения автомобиля на льду: а – автомобиль на зимних не шипованных шинах; б – автомобиль на шипованных шинах.
Обратите внимание, что пички скорости – не шумы измерений, а совершенно реальны, именно так движется автомобиль на льду.
Данные датчики, конечно - же используются и в промышленности. Здесь приведем только один яркий демонстрационный пример: измерение длины стекла. Объект: вращающийся диск из полированного стекла с максимально чистой поверхностью. Измеритель – лазерный, с номинальным рабочим расстоянием 130 см (в реальности стекло горячее, поэтому требуются измерения с больших дистанций). На диске нанесена метка – начало и конец измерений окружности, которая считывалась датчиком. Длина измеряемой окружности - 2,173 м. Проведено две серии измерений по 7 и 11 измерений. Средняя измеренная длина составила 2,1732 и 2,1733 м при стандартном отклонении 0,034 и 0,036%.
Из последних разработок ООО «ПТП«Сенсорика-М» можно также упомянуть двумерные лазерные датчики, позволяющие, в частности, измерять поступательную скорость вращающейся на рольгангах трубы – актуальная задача на участках нанесения изоляции на трубопрокатных заводах (серийный вариант будет доступен во втором квартале 2015 г.). И уж совсем экзотика – измерение скорости подводных аппаратов относительно среды (экспериментальный образец демонстрировался на форуме «Морская индустрия России» [3]). И много другого. Из-за ограниченности объема статьи здесь можно только посоветовать посетить сайт производителя.
Таким образом, «наши» бесконтактные датчики пути – скорости ни в чем не уступают мировым аналогам, а зачастую и превосходят их. При этом стоят на данный момент в несколько раз дешевле.
С. Ф. Растопов, к. ф.-м. н., технический специалист,
ООО «ПТП«Сенсорика-М»., г. Москва,
тел.: (499) 753-3990, (499) 487-0363
e-mail: info@sensorika.com
www.sensorika.com
Ссылки:
1. Y. Aizu T. Asakura, Spatial Filtering Velocimetry, Fundamentals and Applications, Springer Series in Optical Sciences (Book 116), 2005, 212р.
2. Патент РФ № 2482499 и Патент DE 11 2011 102 253 B4.
3. IV Международный форум «Морская индустрия России», выставочный комплекс «Гостиный двор», Москва, 20-22 мая 2014 г.